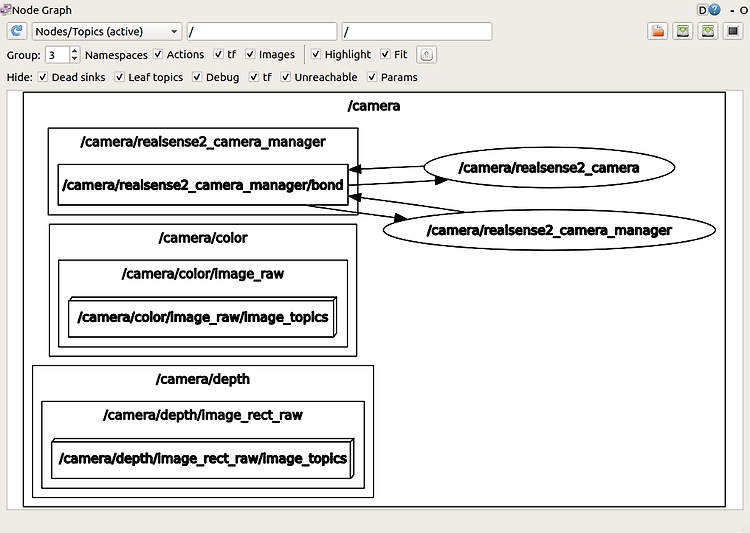
ROS Melodic setting https://jstar0525.tistory.com/116 Intel Realsense setting https://jstar0525.tistory.com/117 Record Intel Realsense camera $ roscore $ roslaunch realsense2_camera rs_camera.launch $ cd ~/data $ rosbag record -a --split --duration 60 Check data using rqt $ rqt_bag