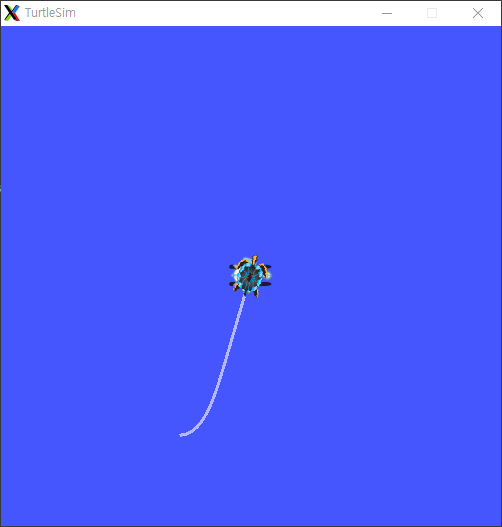
Env. VMware workstation(Ubuntu 18.04 amd64, ROS Melodic) 1. How to create a tf listener $ roscd learning_tf $ nano ./nodes/turtle_tf_listener.py #!/usr/bin/env python import roslib roslib.load_manifest('learning_tf') import rospy import math import tf import geometry_msgs.msg import turtlesim.srv if __name__ == '__main__': rospy.init_node('turtle_tf_listener') listener = tf.TransformListener() r..