Env.
VMware workstation(Ubuntu 18.04 amd64, ROS Melodic)
1. How to create a tf listener
$ roscd learning_tf
$ nano ./nodes/turtle_tf_listener.py#!/usr/bin/env python
import roslib
roslib.load_manifest('learning_tf')
import rospy
import math
import tf
import geometry_msgs.msg
import turtlesim.srv
if __name__ == '__main__':
rospy.init_node('turtle_tf_listener')
listener = tf.TransformListener()
rospy.wait_for_service('spawn')
spawner = rospy.ServiceProxy('spawn', turtlesim.srv.Spawn)
spawner(4, 2, 0, 'turtle2')
turtle_vel = rospy.Publisher('turtle2/cmd_vel', geometry_msgs.msg.Twist,queue_size=1)
rate = rospy.Rate(10.0)
while not rospy.is_shutdown():
try:
(trans,rot) = listener.lookupTransform('/turtle2', '/turtle1', rospy.Time(0))
except (tf.LookupException, tf.ConnectivityException, tf.ExtrapolationException):
continue
angular = 4 * math.atan2(trans[1], trans[0])
linear = 0.5 * math.sqrt(trans[0] ** 2 + trans[1] ** 2)
cmd = geometry_msgs.msg.Twist()
cmd.linear.x = linear
cmd.angular.z = angular
turtle_vel.publish(cmd)
rate.sleep()$ chmod +x ./nodes/turtle_tf_listener.py
1.1 tf.TransformListener()와 lookupTransform
은 아래와 같다.
https://github.com/ros/geometry/blob/melodic-devel/tf/src/tf/listener.py
GitHub - ros/geometry: Packages for common geometric calculations including the ROS transform library, "tf". Also includes ROS b
Packages for common geometric calculations including the ROS transform library, "tf". Also includes ROS bindings for "bullet" physics engine and "kdl" kinematics/dynam...
github.com
TransformListener는 TransformerROS를 상속하고 있고,
class TransformListener(TransformerROS):
"""
TransformListener is a subclass of :class:`tf.TransformerROS` that
subscribes to the ``"/tf"`` message topic, and calls :meth:`tf.Transformer.setTransform`
with each incoming transformation message.
In this way a TransformListener object automatically
stays up to to date with all current transforms. Typical usage might be::
import tf
from geometry_msgs.msg import PointStamped
class MyNode:
def __init__(self):
self.tl = tf.TransformListener()
rospy.Subscriber("/sometopic", PointStamped, self.some_message_handler)
...
def some_message_handler(self, point_stamped):
# want to work on the point in the "world" frame
point_in_world = self.tl.transformPoint("world", point_stamped)
...
"""TransformerROS는 Transformer를 상속하고 있으며,
class TransformerROS(Transformer):
"""
TransformerROS extends the base class :class:`tf.Transformer`,
adding methods for handling ROS messages.
"""Transformer와 lookupTransform은 아래와 같다.
class Transformer(object):
def __init__(self, interpolate=True, cache_time=None):
self._buffer = tf2_ros.Buffer(cache_time, debug=False)
self._using_dedicated_thread = False
def lookupTransform(self, target_frame, source_frame, time):
msg = self._buffer.lookup_transform(strip_leading_slash(target_frame), strip_leading_slash(source_frame), time)
t = msg.transform.translation
r = msg.transform.rotation
return [t.x, t.y, t.z], [r.x, r.y, r.z, r.w]tf2_ros.Buffer에 대해서는 아래를 참고바란다.
https://github.com/ros/geometry2/blob/melodic-devel/tf2_ros/src/tf2_ros/buffer.py
GitHub - ros/geometry2: A set of ROS packages for keeping track of coordinate transforms.
A set of ROS packages for keeping track of coordinate transforms. - GitHub - ros/geometry2: A set of ROS packages for keeping track of coordinate transforms.
github.com
2. Running the listener
$ nano ./launch/start_demo.launch <launch>
<!-- Turtlesim Node-->
<node pkg="turtlesim" type="turtlesim_node" name="sim"/>
<node pkg="turtlesim" type="turtle_teleop_key" name="teleop" output="screen"/>
<node name="turtle1_tf_broadcaster" pkg="learning_tf" type="turtle_tf_broadcaster.py" respawn="false" output="screen" >
<param name="turtle" type="string" value="turtle1" />
</node>
<node name="turtle2_tf_broadcaster" pkg="learning_tf" type="turtle_tf_broadcaster.py" respawn="false" output="screen" >
<param name="turtle" type="string" value="turtle2" />
</node>
<node pkg="learning_tf" type="turtle_tf_listener.py" name="listener" />
</launch># 1st terminal
$ roslaunch learning_tf start_demo.launch시작하면 가운데 있는 거북이(turtle1)로 다른 거북이(turtle2)가 이동을 한다.
또한, 화살표로 가운데의 거북이(turtle1)를 움직이면 다른 거북이(turtle2)가 따라온다.

3. Checking the results
3.1 rqt
# 2nd terminal
$ rqt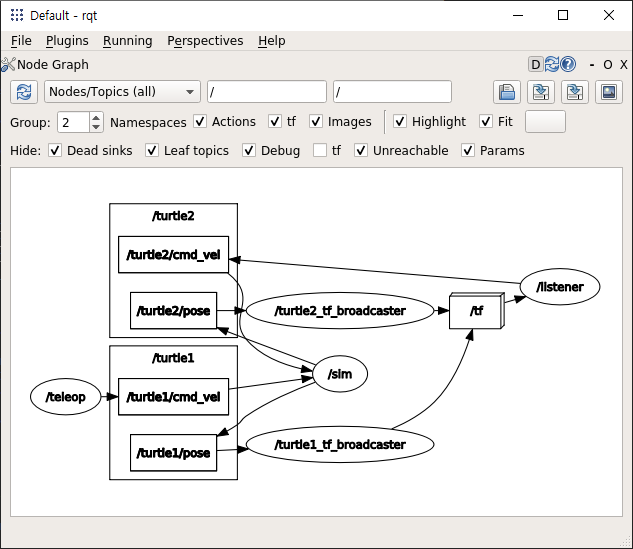
3.2 tf_echo
# 2nd terminal
$ rosrun tf tf_echo turtle1 turtle2
At time 1661263747.336
- Translation: [0.000, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.514, 0.858]
in RPY (radian) [0.000, -0.000, 1.079]
in RPY (degree) [0.000, -0.000, 61.831]
At time 1661263748.072
- Translation: [0.000, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.514, 0.858]
in RPY (radian) [0.000, -0.000, 1.079]
in RPY (degree) [0.000, -0.000, 61.831]
At time 1661263749.080
- Translation: [0.000, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.514, 0.858]
in RPY (radian) [0.000, -0.000, 1.079]
in RPY (degree) [0.000, -0.000, 61.831]
...3.3 rviz
# 2nd terminal
$ rviz
ref.
http://wiki.ros.org/tf/Tutorials/Writing%20a%20tf%20listener%20%28Python%29
tf/Tutorials/Writing a tf listener (Python) - ROS Wiki
EOL distros: electric fuerte groovy hydro indigo jade kinetic lunar In the previous tutorials we created a tf broadcaster to publish the pose of a turtle to tf. In this tutorial we'll create a tf listener to start using tf. How to create a tf listener
wiki.ros.org