Env.
VMware workstation(Ubuntu 18.04 amd64, ROS Melodic)
0. Create package
$ mkdir -p ~/catkin_ws/src
$ cd ~/catkin_ws/src
$ catkin_create_pkg learning_tf tf roscpp rospy turtlesim
$ cd ..
$ catkin_make
$ source ./devel/setup.bash
1. How to broadcast transforms
$ roscd learning_tf
$ mkdir nodes
$ nano ./nodes/turtle_tf_broadcaster.py#!/usr/bin/env python
import roslib
roslib.load_manifest('learning_tf')
import rospy
import tf
import turtlesim.msg
def handle_turtle_pose(msg, turtlename):
br = tf.TransformBroadcaster()
br.sendTransform((msg.x, msg.y, 0),
tf.transformations.quaternion_from_euler(0, 0, msg.theta),
rospy.Time.now(),
turtlename,
"world")
if __name__ == '__main__':
rospy.init_node('turtle_tf_broadcaster')
turtlename = rospy.get_param('~turtle')
rospy.Subscriber('/%s/pose' % turtlename,
turtlesim.msg.Pose,
handle_turtle_pose,
turtlename)
rospy.spin()$ chmod +x ./nodes/turtle_tf_broadcaster.py
1.1 tf.TransformBroadcaster()와 sendTransform
에 대해서는 아래와 같다.
https://github.com/ros/geometry/blob/melodic-devel/tf/src/tf/broadcaster.py
GitHub - ros/geometry: Packages for common geometric calculations including the ROS transform library, "tf". Also includes ROS b
Packages for common geometric calculations including the ROS transform library, "tf". Also includes ROS bindings for "bullet" physics engine and "kdl" kinematics/dynam...
github.com
class TransformBroadcaster:
"""
:class:`TransformBroadcaster` is a convenient way to send transformation updates on the ``"/tf"`` message topic.
"""
def __init__(self, queue_size=100):
self.tf2_broadcaster = tf2_ros.transform_broadcaster.TransformBroadcaster()
def sendTransform(self, translation, rotation, time, child, parent):
"""
:param translation: the translation of the transformtion as a tuple (x, y, z)
:param rotation: the rotation of the transformation as a tuple (x, y, z, w)
:param time: the time of the transformation, as a rospy.Time()
:param child: child frame in tf, string
:param parent: parent frame in tf, string
Broadcast the transformation from tf frame child to parent on ROS topic ``"/tf"``.
"""
t = geometry_msgs.msg.TransformStamped()
t.header.frame_id = parent
t.header.stamp = time
t.child_frame_id = child
t.transform.translation.x = translation[0]
t.transform.translation.y = translation[1]
t.transform.translation.z = translation[2]
t.transform.rotation.x = rotation[0]
t.transform.rotation.y = rotation[1]
t.transform.rotation.z = rotation[2]
t.transform.rotation.w = rotation[3]
self.sendTransformMessage(t)
2. Running the broadcaster
$ mkdir launch
$ nano ./launch/start_demo.launch <launch>
<!-- Turtlesim Node-->
<node pkg="turtlesim" type="turtlesim_node" name="sim"/>
<node pkg="turtlesim" type="turtle_teleop_key" name="teleop" output="screen"/>
<node name="turtle1_tf_broadcaster" pkg="learning_tf" type="turtle_tf_broadcaster.py" respawn="false" output="screen" >
<param name="turtle" type="string" value="turtle1" />
</node>
<node name="turtle2_tf_broadcaster" pkg="learning_tf" type="turtle_tf_broadcaster.py" respawn="false" output="screen" >
<param name="turtle" type="string" value="turtle2" />
</node>
</launch># 1st terminal
$ roslaunch learning_tf start_demo.launch
3. Checking the results
3.1 tf_echo
# 2nd terminal
$ rosrun tf tf_echo /world /turtle1
At time 1661260426.290
- Translation: [5.113, 7.960, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.953, 0.302]
in RPY (radian) [0.000, -0.000, 2.528]
in RPY (degree) [0.000, -0.000, 144.844]
At time 1661260427.060
- Translation: [5.113, 7.960, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.953, 0.302]
in RPY (radian) [0.000, -0.000, 2.528]
in RPY (degree) [0.000, -0.000, 144.844]
At time 1661260428.050
- Translation: [5.113, 7.960, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.953, 0.302]
in RPY (radian) [0.000, -0.000, 2.528]
in RPY (degree) [0.000, -0.000, 144.844]
At time 1661260429.059
- Translation: [5.113, 7.960, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.953, 0.302]
in RPY (radian) [0.000, -0.000, 2.528]
in RPY (degree) [0.000, -0.000, 144.844]
...3.2 rqt
# 2nd terminal
$ rqt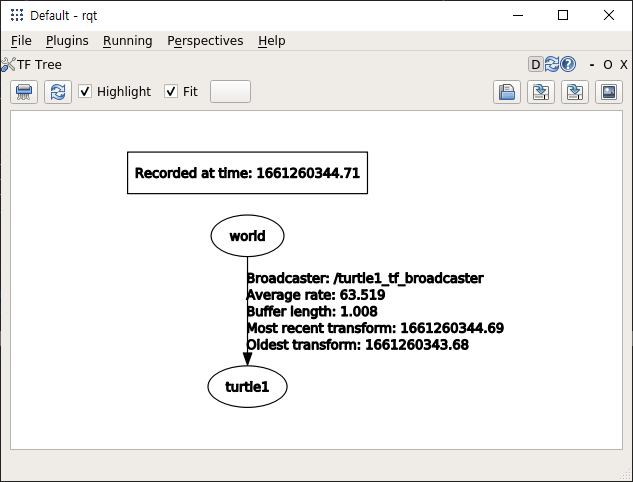

3.3 rviz
# 2nd terminal
$ rviz
ref.
http://wiki.ros.org/tf/Tutorials/Writing%20a%20tf%20broadcaster%20%28Python%29
tf/Tutorials/Writing a tf broadcaster (Python) - ROS Wiki
In the next two tutorials we will write the code to reproduce the demo from the tf introduction tutorial. After that, the following tutorials focus on extending the demo with more advanced tf features. Before we get started, you need to create a new ros pa
wiki.ros.org