이번 시간에는 기어 중에서 스퍼기어에 대해 알아보겠습니다.
0. 개요
기어 (gear), 치차 (toothed wheel) : 차례로 물리는 이(치)에 의하여 운동을 전달시키는 기계요소
특징 : 확실한 속도비, 작고 간단한 구조이지만 높은 효율로 큰 회전력 전달
휠, 기어 : 서로 맞물려서 회전하는 한 쌍의 기어 중에서 잇수가 많은 기어
피니언 (pinion) : 서로 맞물려서 회전하는 한 쌍의 기어 중에서 잇수가 적은 기어
1. 평기어 (스퍼기어)
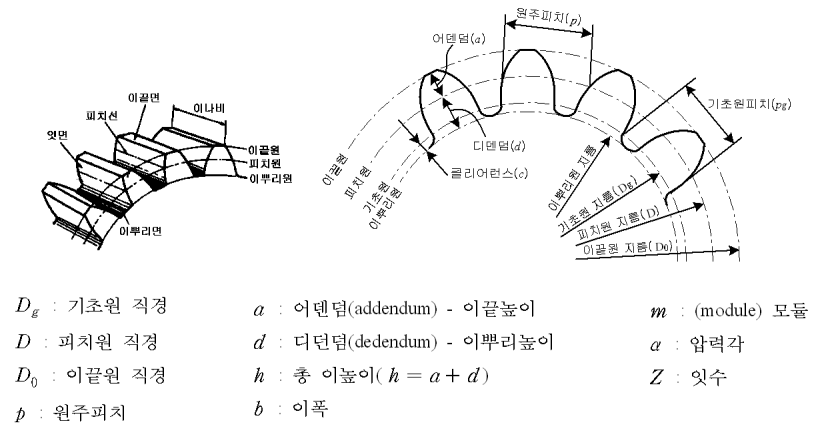
피치원 (pitch circle) : 기어는 마찰차에 요철을 붙인 것으로,
원통 마찰차라고 가정할 때, 마찰차가 접촉하고 있는 원에 상당하는 원
원주 피치 (circular pitch) : 피치원 위에서 측정한 2개의 이웃하는 이에 대응하는 부분 간의 거리
기초원 (base circle) : 이 모양 곡선을 만들기 위한 원
이끝 원 (addendum circle) : 기어의 이 끝을 연결한 원
이뿌리 원 (tooth circle) : 기어의 이뿌리를 연결한 원
백래시 (back lash) : 한 쌍의 기어를 물렸을 때 이의 뒷면에 생기는 간격
접촉각 (angle of action) : 구동 기어의 한 개의 이가 피동 기어에 물리는 이와 접촉하여 회전한 각도
1) 모듈 m

m : 모듈
D : 피치원 직경 [mm]
Z : 잇수
a : 이끝높이, 어덴덤(addendum)
2) 원주 피치 p (미터계)

3) 직경 피치 p_d (인치계)

4) 이끝원 지름 D_0

6) 기초원 지름 D_g

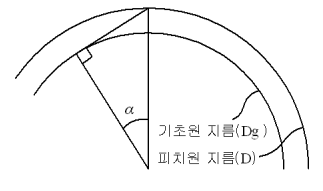
α : 압력각
7) 기초원 피치 (법선 피치) p_g

8) 이끝 틈새, 클리어런스 c

k : 클리어런스 계수
9) 이뿌리 높이 d

10) 이높이 h

11) 속비 i

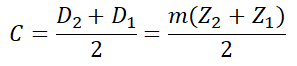
12) 중심거리 C
13) 기어의 회전력
전달 동력을 구할 때, Lewis식, Hertz식, 축작용력 중 가장 작은 값 선택
(1) Lewis(루이스)의 굽힘강도에 의한 회전력
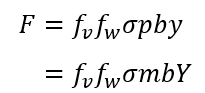
f_v : 속도계수
f_w : 하중계수
σ : 허용굽힘응력
p : 원주피치
b : 치폭(이폭)
m : 모듈
y : 치형계수
Y : π를 포함한 치형계수 (=πy)
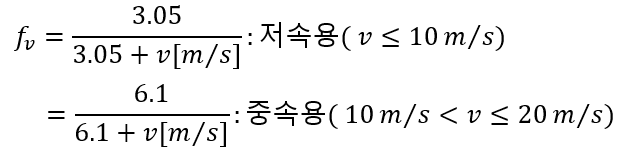
v : 원주속도
(2) Hertz의 면압강도에 의한 회전력
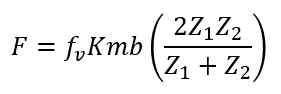
K : 접촉면 응력계수 (응력 수정계수)
Z_n : 잇수
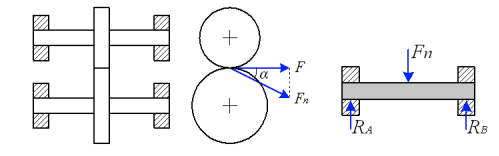
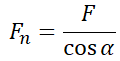
(3) 축작용력 F_n
14) 이 간섭과 언더컷 (under cut)
이 간섭 (interference of toorh) : 두 치차의 속비가 현저히 크거나 잇수가 작을 경우,
한 쪽 치차의 이끝이 상대편 치차의 이뿌리에 닿아 회전을 방해하는 현상
언더컷 (under cut) : 이의 간섭이 일어나 이뿌리 부분이 파 먹혀 가늘게 되어 물림길이가 감소하는 현상
언더컷 방지법
- 이높이를 낮춘다
- 한계 잇수 Z_g 이상으로 한다
한계 잇수 - 전위기어를 만든다

- 압력각을 크게 한다
ref.
https://www.youtube.com/watch?v=x9gPSQK2zZ0
https://blog.naver.com/hjqad1/222293983547
전위기어 특징
전위기어 사용목적 - 두 기어 사이의 중심거리를 변화시키고자 할 때 - 언더컷을 방지하고자 할 때 - 이의 ...
blog.naver.com