반응형
이 글은 아래의 논문을 토대로 구성되었습니다.
Borenstein, J., & Koren, Y. (1989). Real-time obstacle avoidance for fast mobile robots.
IEEE Transactions on systems, Man, and Cybernetics, 19(5), 1179-1187.
VFF
가상의 froce field를 이용하여 로봇을 자율 주행
- repulsive force : occupied cell에 대하여 로봇이 척력과 같은 힘을 받음
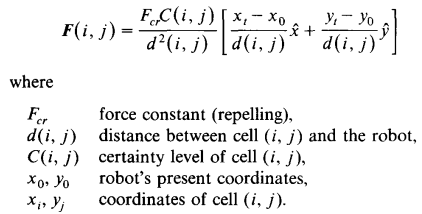
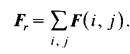
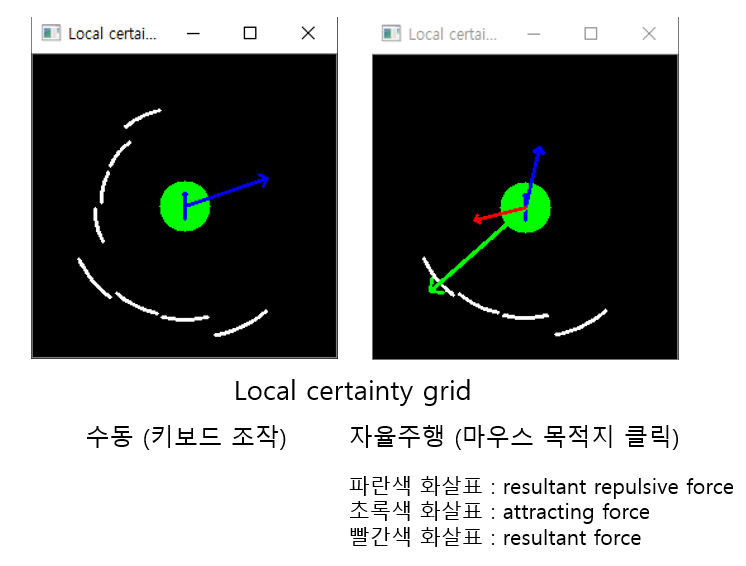
- resultant repulsive force : repulsive force에 대한 합력
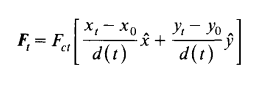
- attracting force : 목적지에 대하여 로봇이 인력과 같은 힘을 받음
- resultant force : resultant repulsive force와 attracting force의 합력
- 이 힘의 방향에 따라 장애물은 피하며 로봇이 목적지로 이동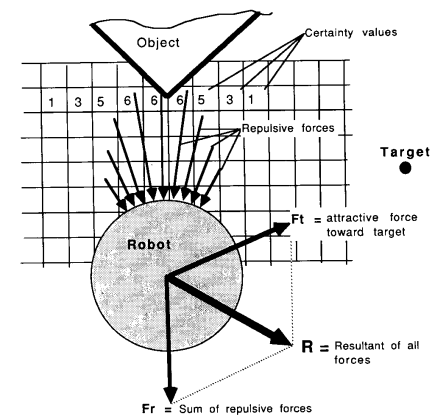
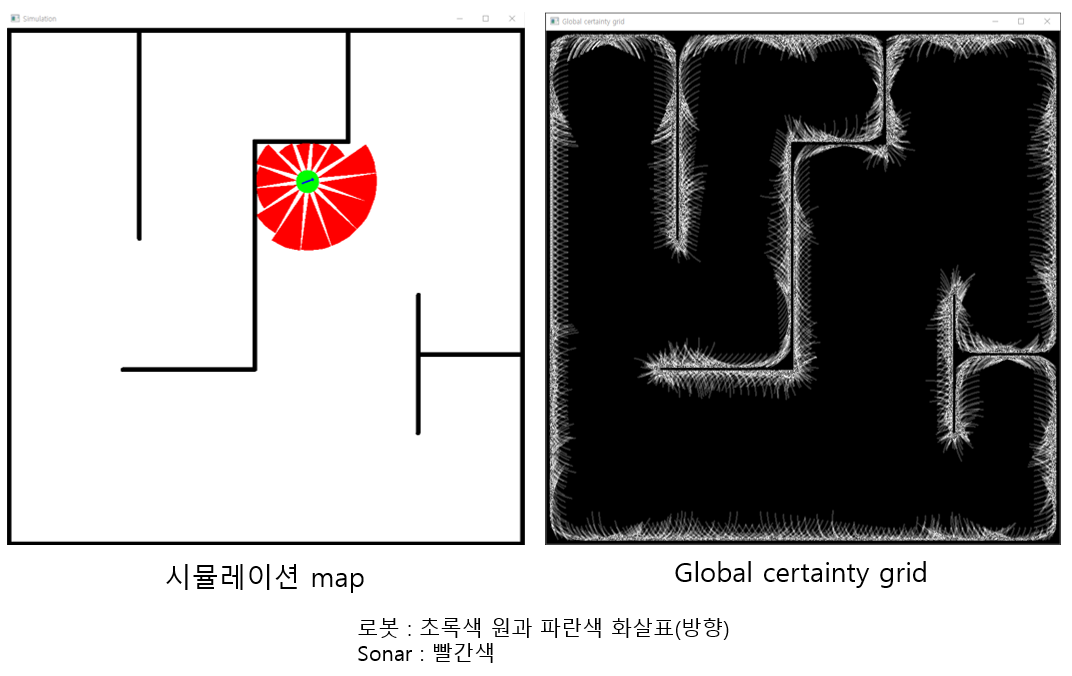
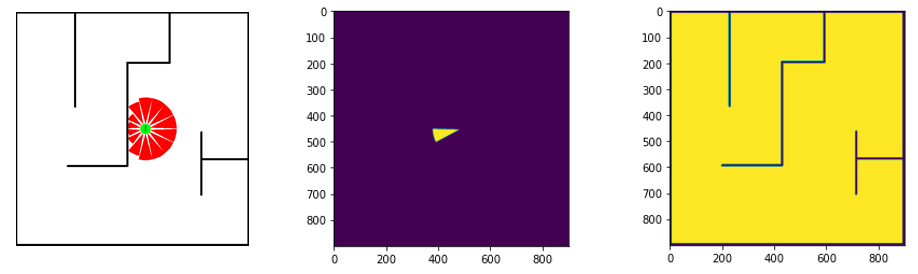
VFF를 활용한 Sonar-based mobile robot simulation (python 구현)
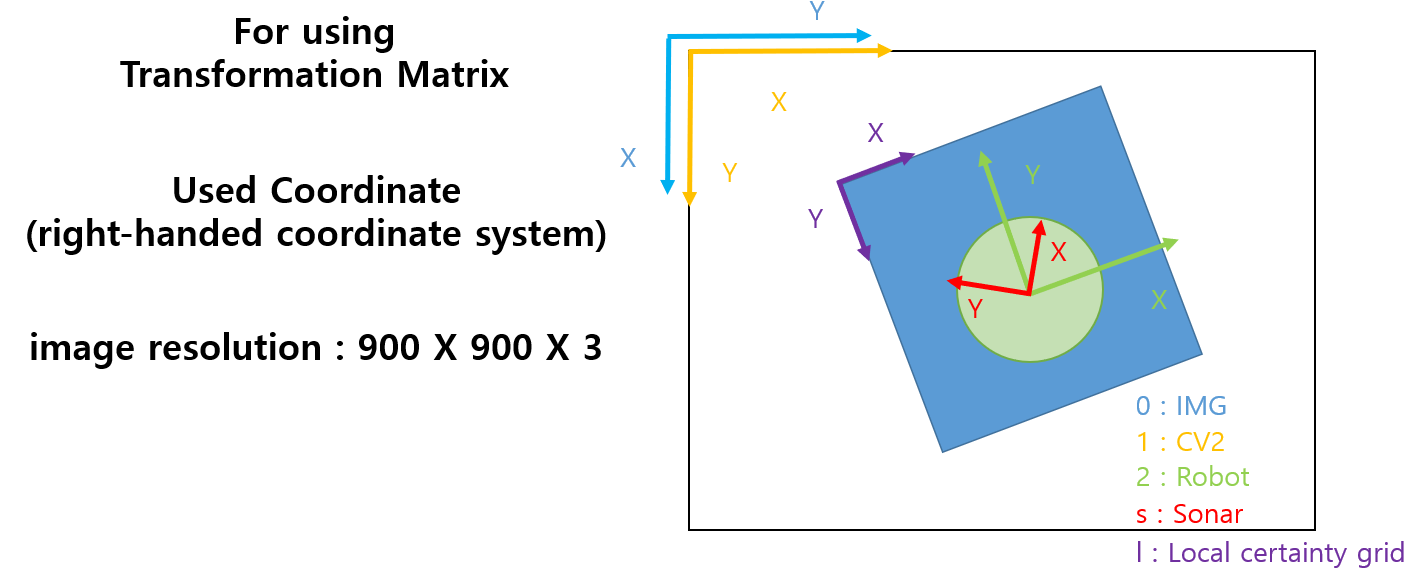
* TF를 위한 좌표계 설정
* 화면 구성
프로그램했던 특징점
1) TF
원의 중심, 화살표의 시작, 목표지점에 대해 TF를 적용하여
많은 연산량을 줄이면서 위치를 쉽게 계산할 수 있었음
2) 개별 sonar에 대한 로봇과 장애물 거리 측정 함수 속도 개선
input : obs - 장애물에 대한 Global map
position - Global map에 대한 sonar position
sonar_area - 개별 sonar에 대한 Global map (R채널)
output : sonar의 검출된 장애물의 최소 거리
- 전체 이미지 사용 (단점 : Global map이 커질수록 속도가 느려짐)
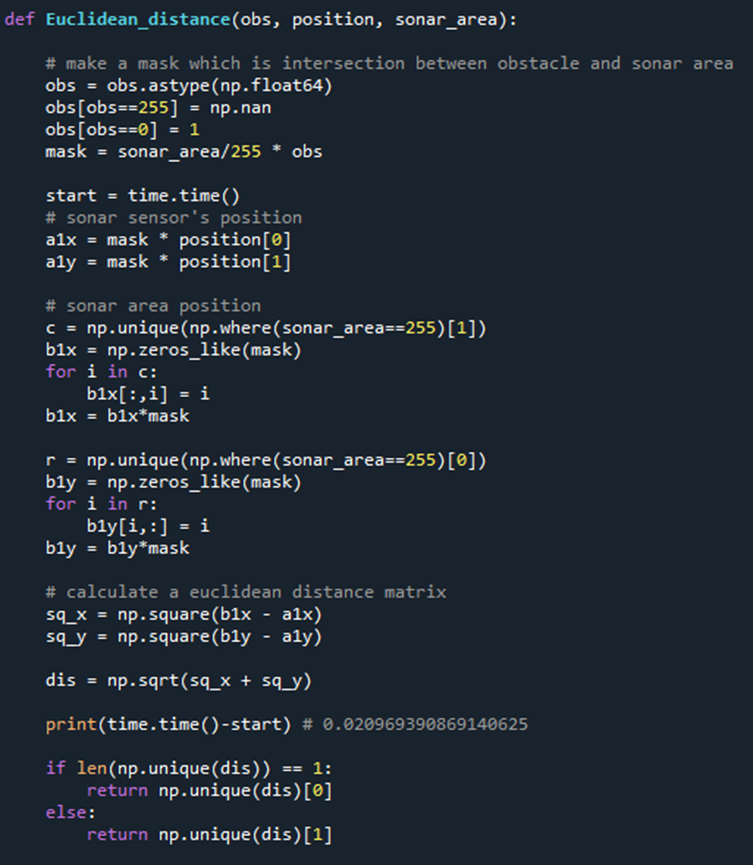
1개의 sonar에 대한 연산 시간 : 0.021sec
총 14개의 sonar에 대한 연산 시간 : 0.294sec
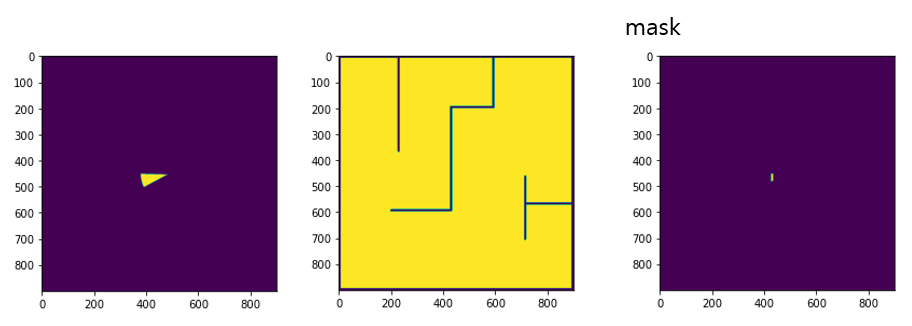
- mask의 인덱스를 이용한 연산
# 0 : img
# 1 : cv2
# 2 : robot
# s : sonar
# l : local certainty grid
# P_sonar : sonar sensor's position on cv2
# sonar_area : each sonar area on image which is channel 1
def Euclidean_distance(obs, P1_sonar, sonar_area):
# make a mask which is intersection between obstacle and sonar area
obs = obs.astype(np.float64)
obs[obs==255] = np.nan #empty
obs[obs==0] = 1 # obstacle
mask = sonar_area/255 * obs
# start = time.time()
idx = np.asarray(np.where(mask==1))
# if don't detect a obstacle
if idx.size==0:
return np.nan
Ps = np.array([[P1_sonar[1]], [P1_sonar[0]]]) # (y, x) in cv2 coordinate
sq = np.square(Ps - idx)
dis = np.sqrt(sq[0,:]+sq[1,:])
m = int(np.min(dis))
# print(time.time()-start) # 0.001990079879760742
return m
1개의 sonar에 대한 연산 시간 : 0.002sec
총 14개의 sonar에 대한 연산 시간 : 0.028sec
따라서 속도를 10배 이상 개선
반응형