Robot/Artificial Intelligence for Robotics
[Udacity] Lesson 4 : Kalman Filters
jstar0525
2023. 6. 14. 22:51
반응형
https://www.udacity.com/course/artificial-intelligence-for-robotics--cs373
Artificial Intelligence for Robotics | Free Courses | Udacity
Take Udacity's Artificial Intelligence of Robotics course and learn how to program all the major systems of a robotic car. Learn online with Udacity.
www.udacity.com
GitHub - jstar0525/ros_for_robotics: ros for robotics
ros for robotics. Contribute to jstar0525/ros_for_robotics development by creating an account on GitHub.
github.com
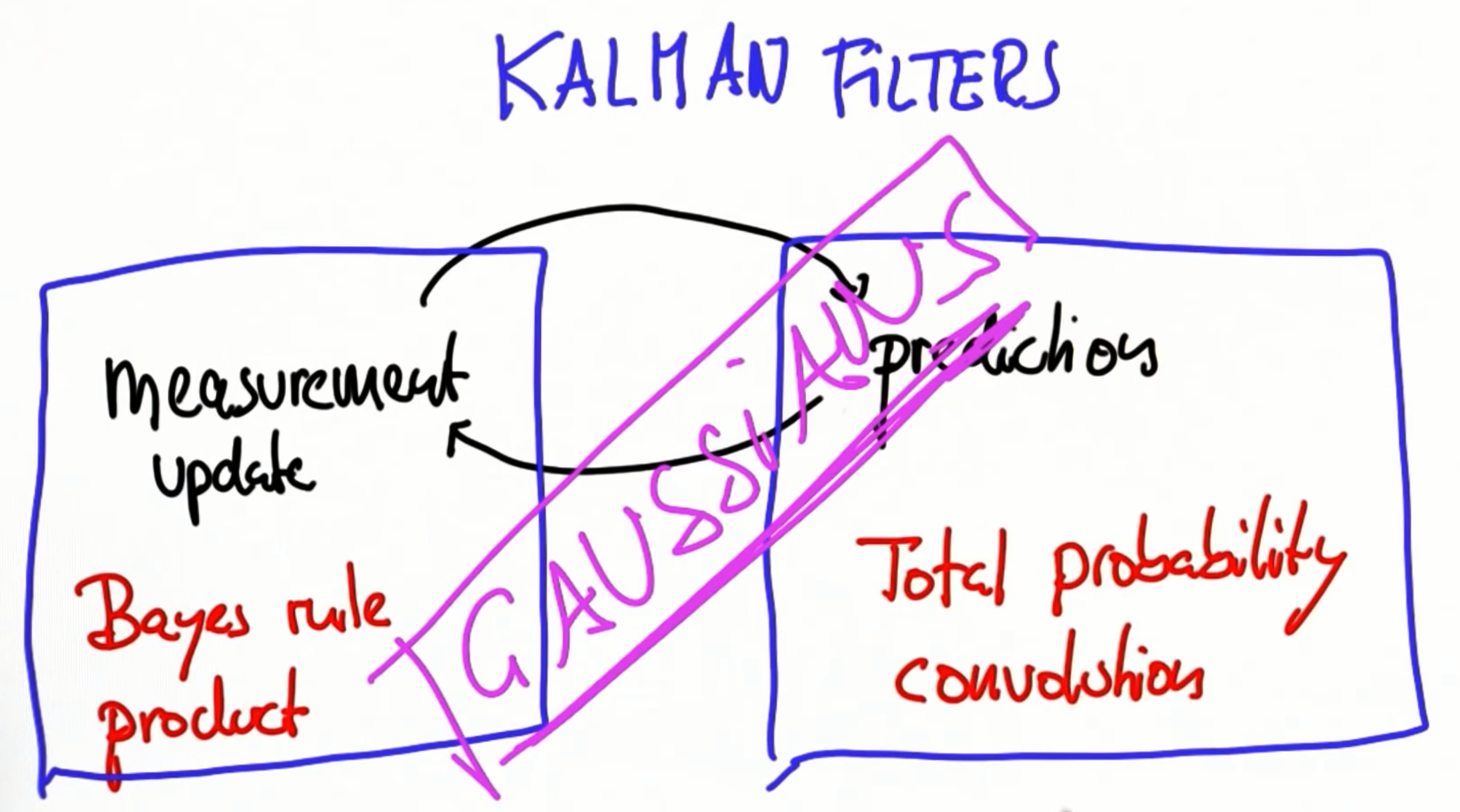
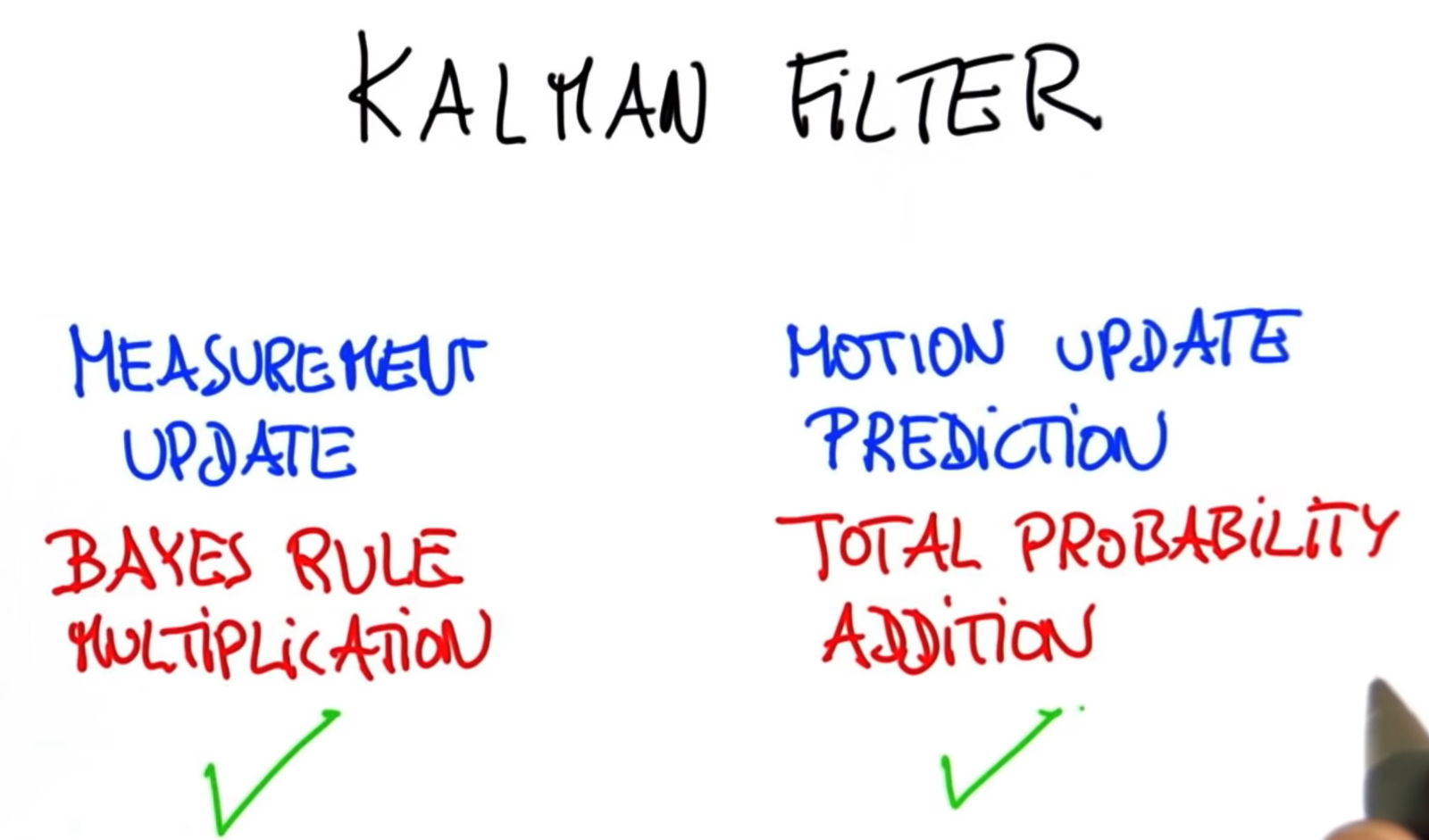
Lesson 4 : Kalman Filters
1. Introduction

2. Become a Professional
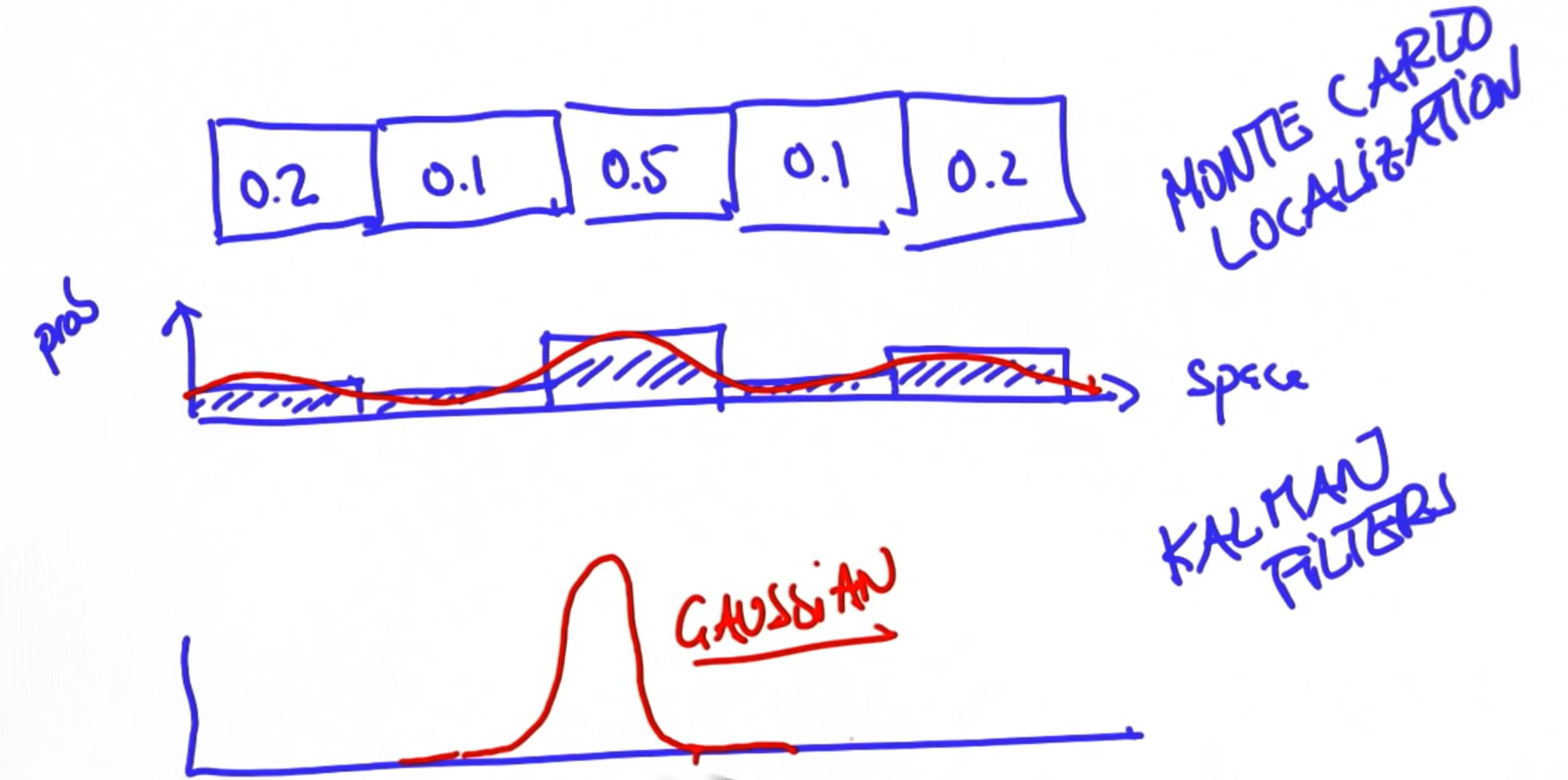
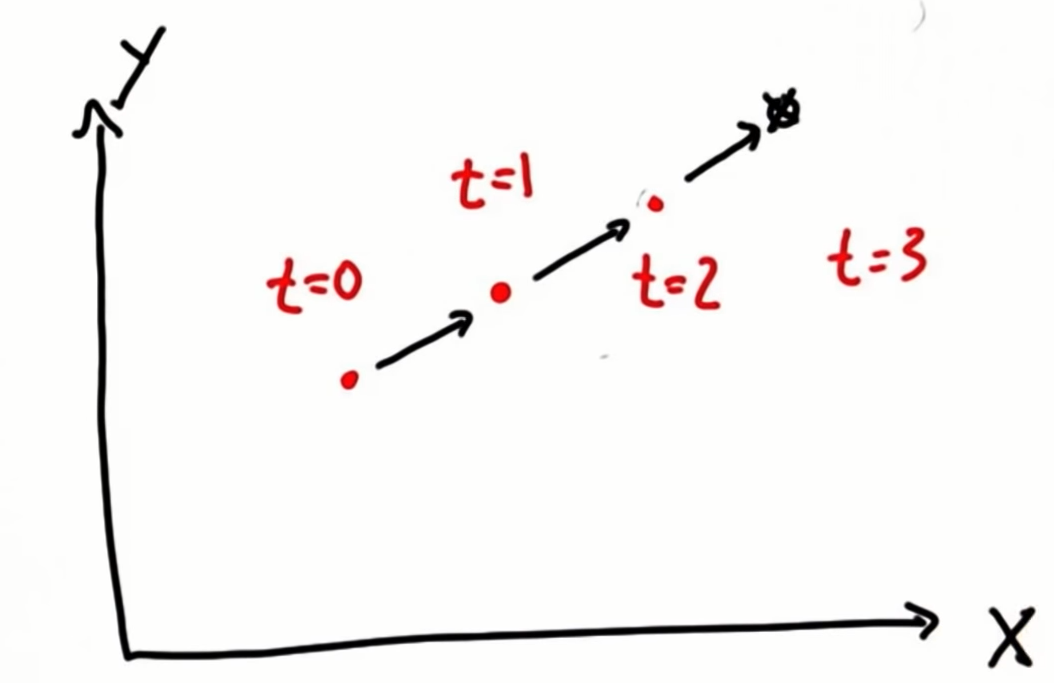
3. Tracking Intro


4. Gaussian Intro


5. Variance Comparison

6. Preferred Gaussian


7. Evaluate Gaussian

8. Maximize Gaussian
#For this problem, you aren't writing any code.
#Instead, please just change the last argument
#in f() to maximize the output.
from math import *
def f(mu, sigma2, x):
return 1/sqrt(2.*pi*sigma2) * exp(-.5*(x-mu)**2 / sigma2)
print(f(10.,4.,8.)) #Change the 8. to something else! # 0.12098536225957168
print(f(10.,4.,10.)) # 0.199471140200716359. Measurement and Motion1
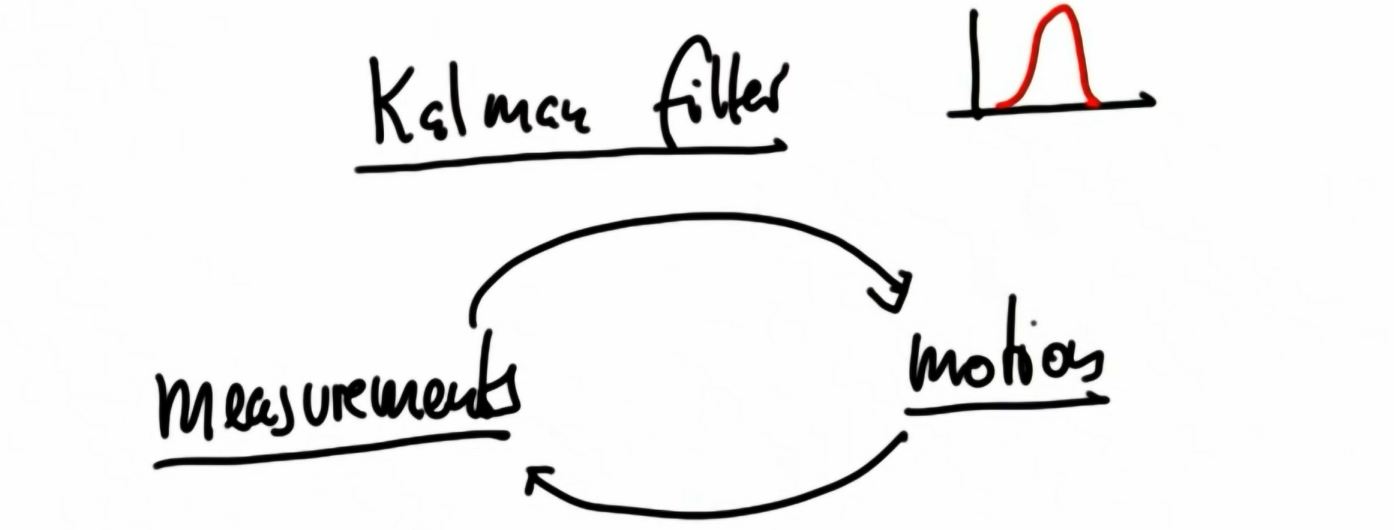
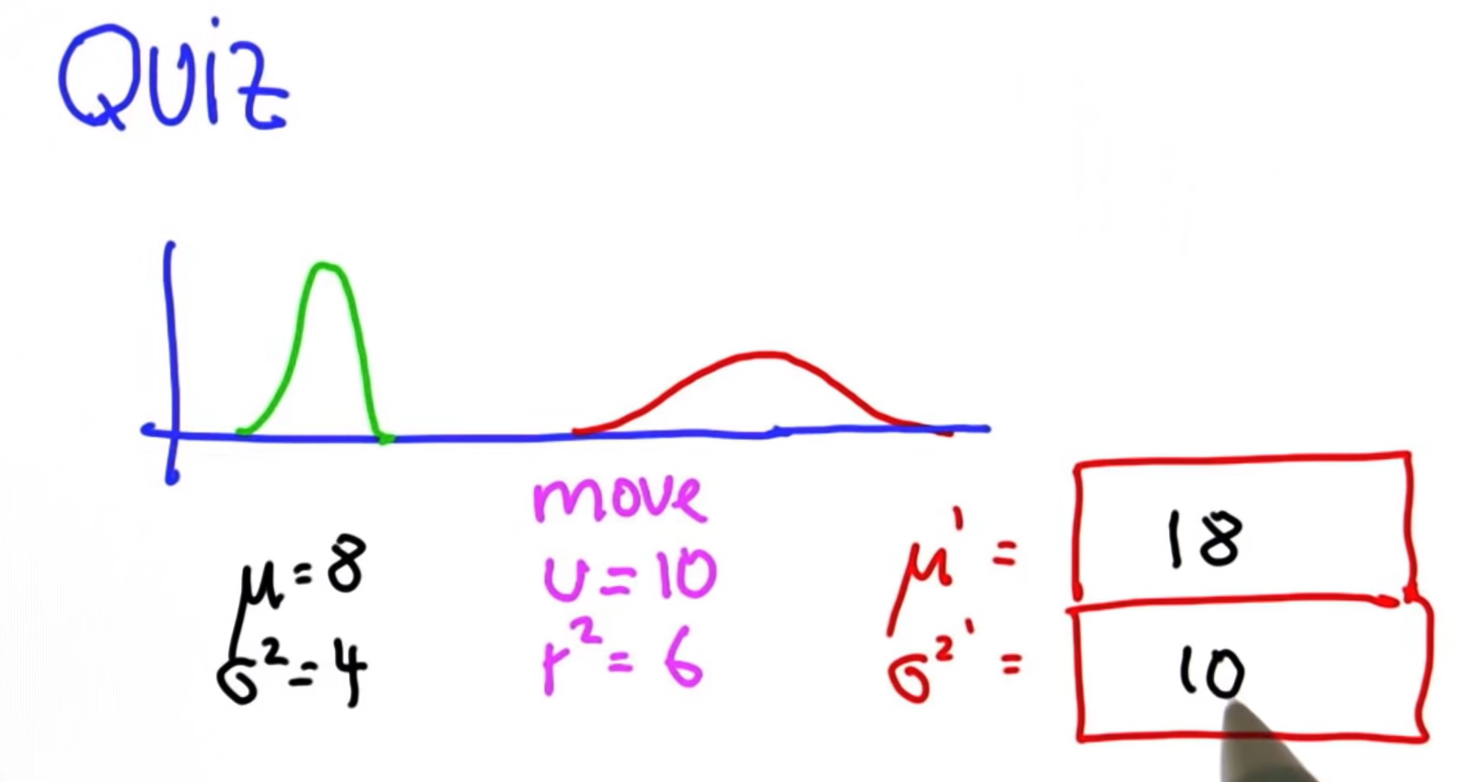
10. Shifting the Mean
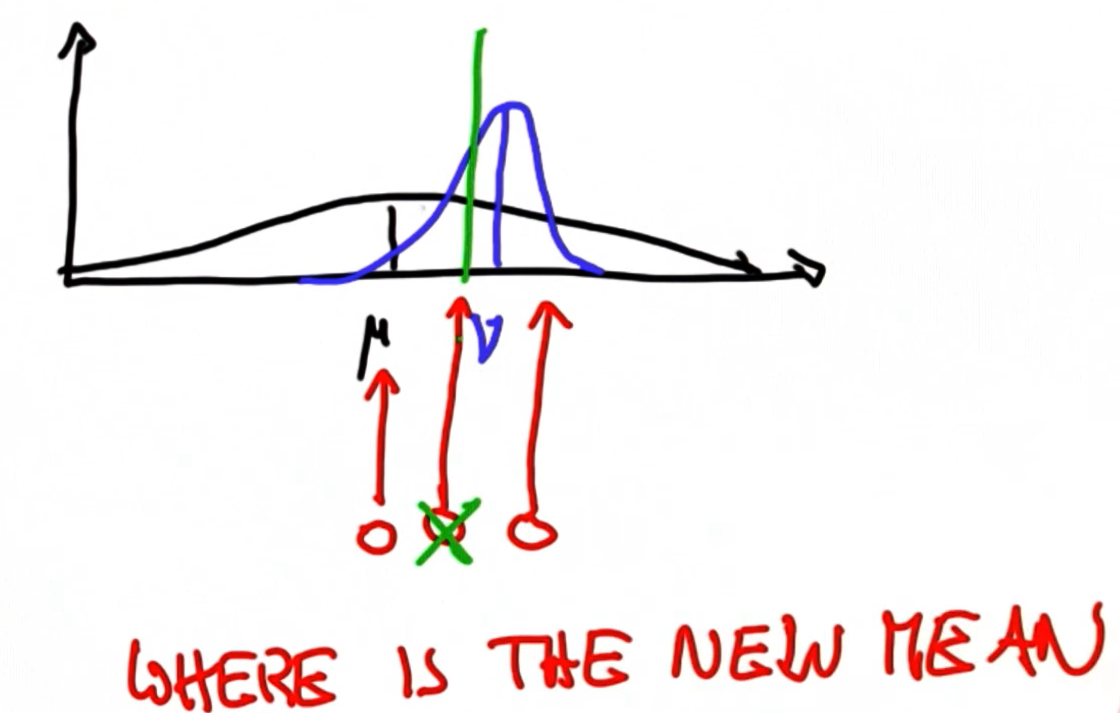
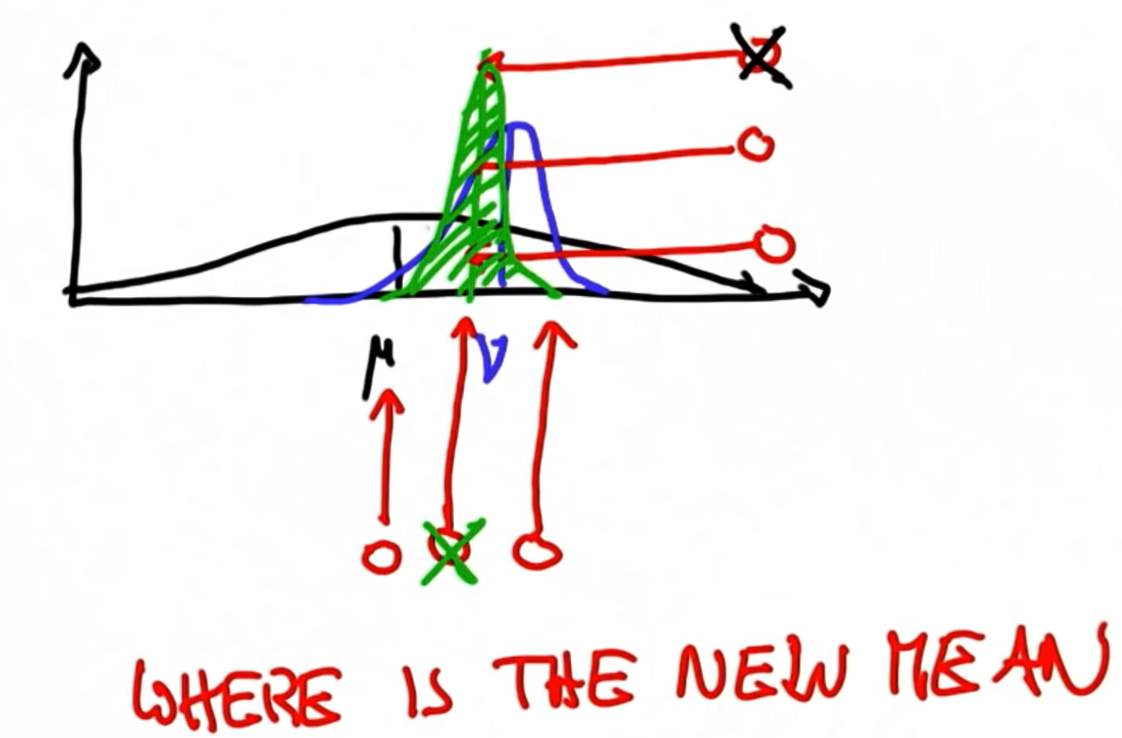
10. Predicting the Peak
11. Parameter Update
12. Parameter Update 2
13. Separated Gaussians
14. Separated Gaussians 2

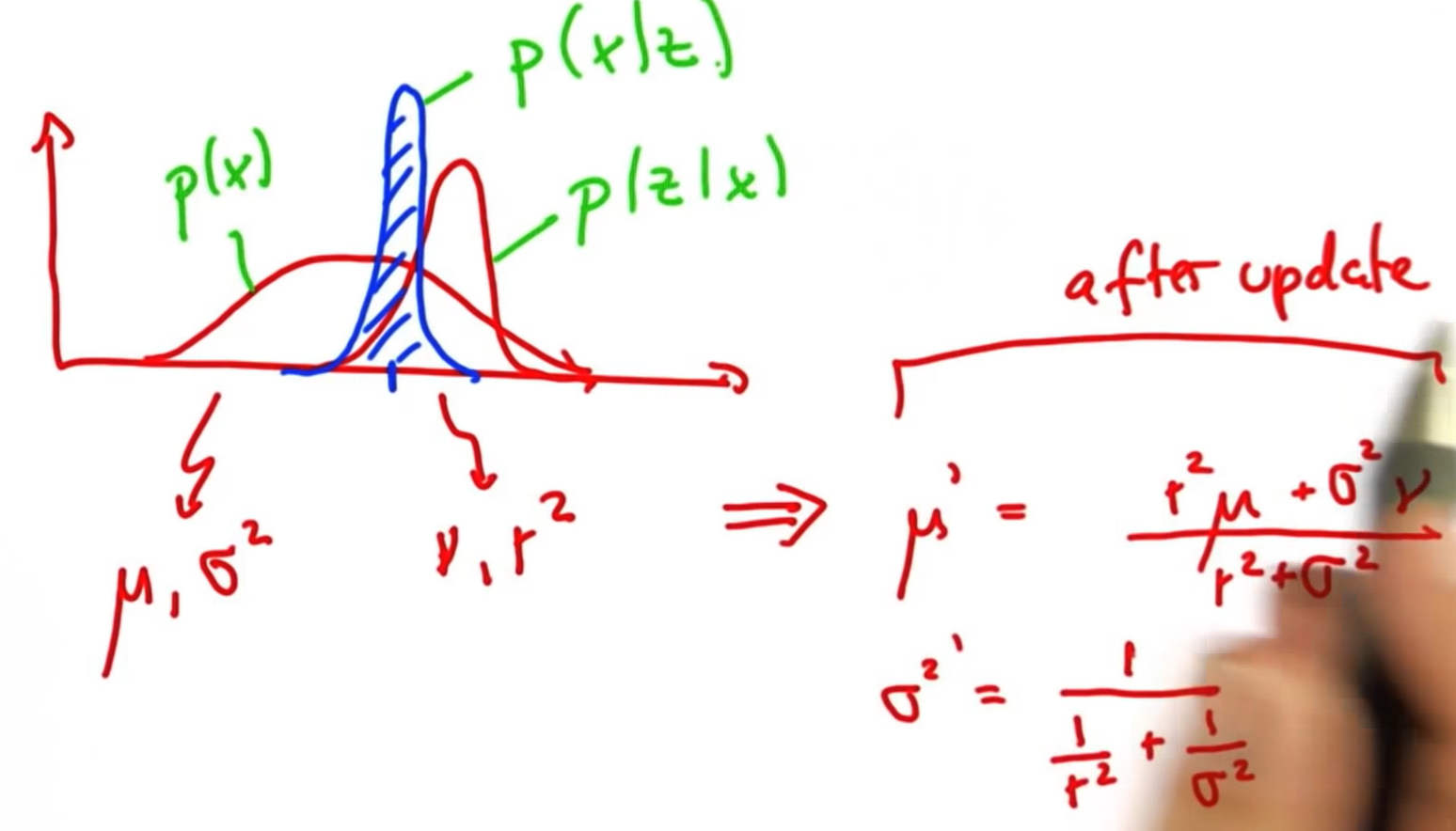
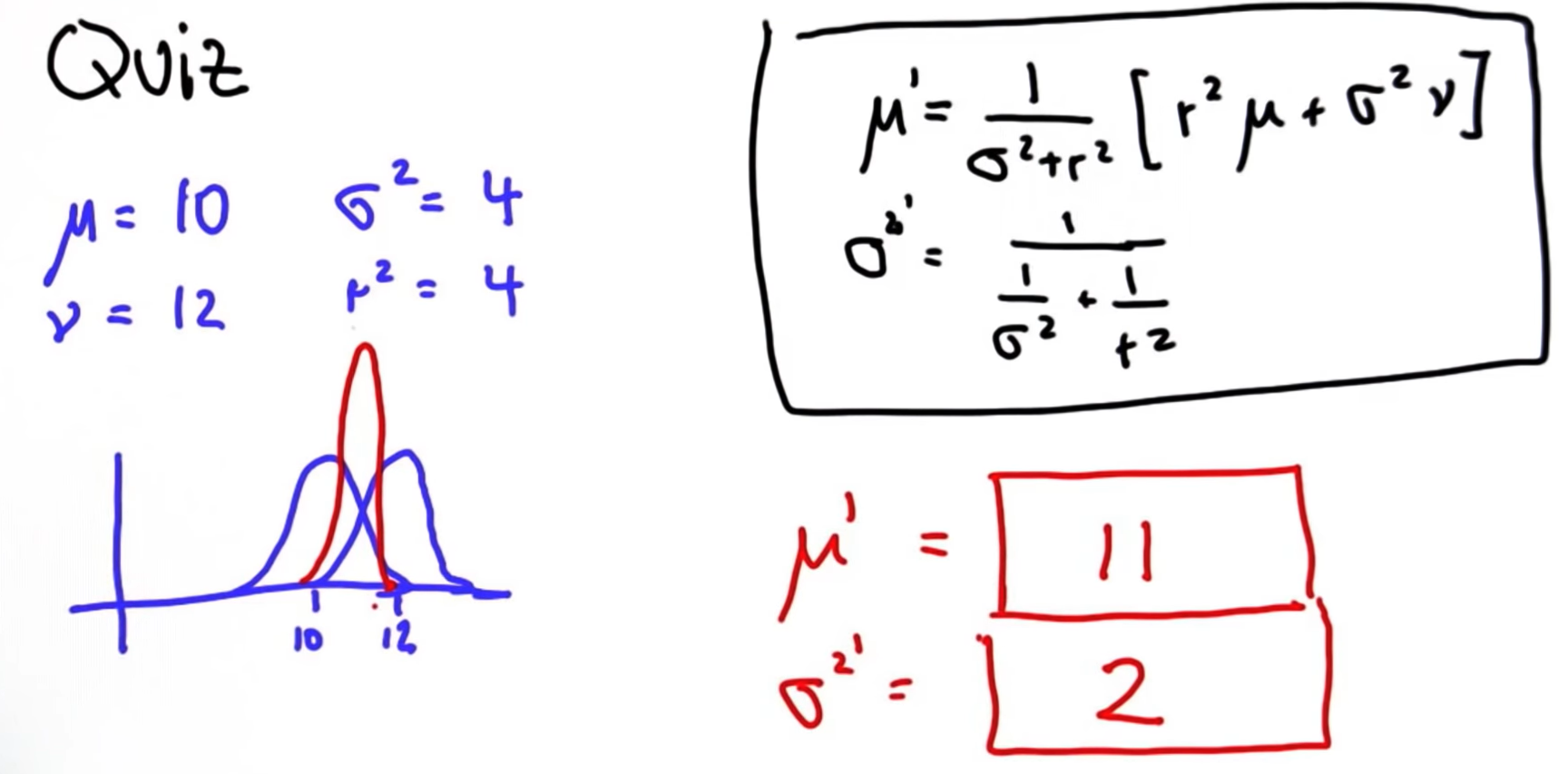
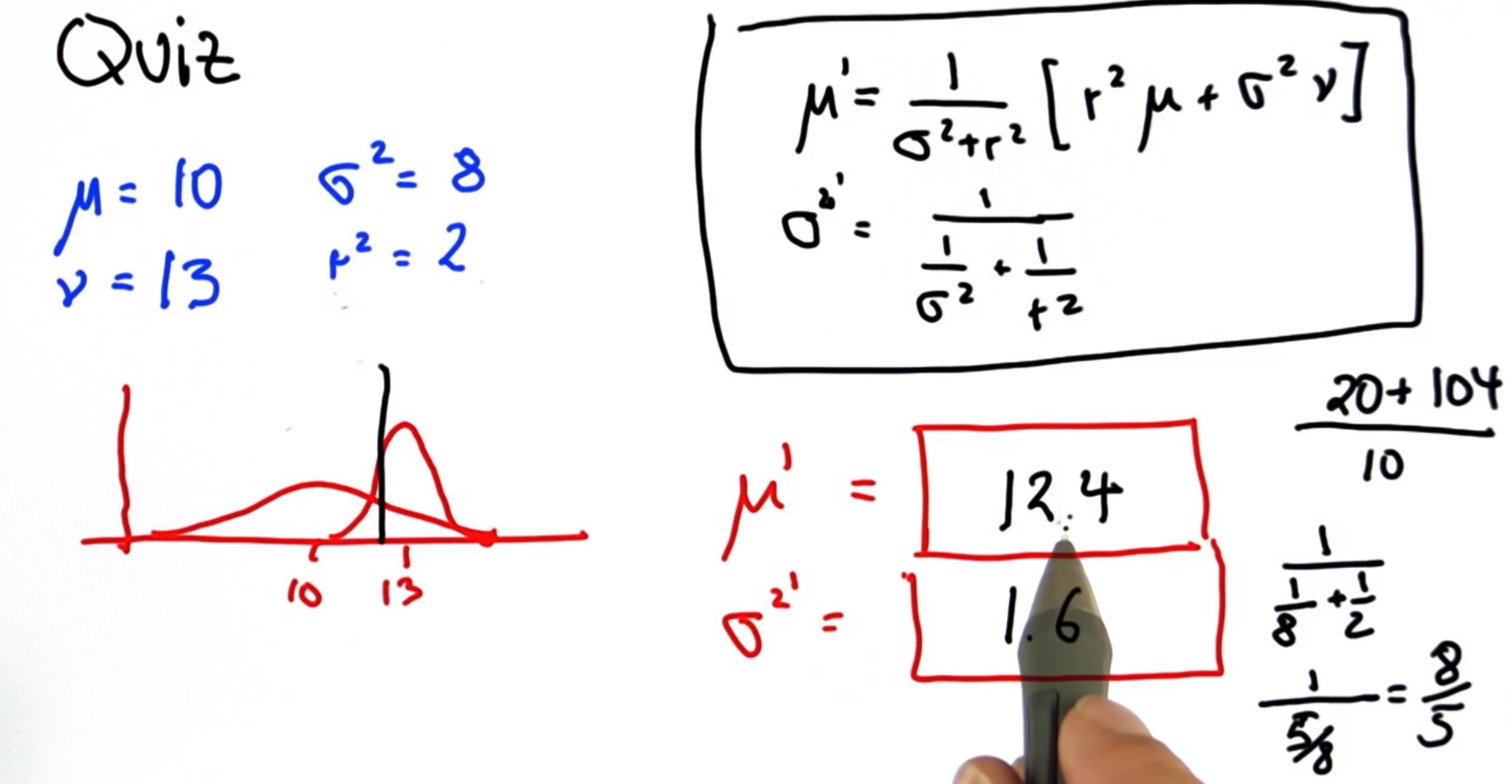
15. New Mean and Variance
# Write a program to update your mean and variance
# when given the mean and variance of your belief
# and the mean and variance of your measurement.
# This program will update the parameters of your
# belief function.
def update(mean1, var1, mean2, var2):
new_mean = (var1*mean2 + var2*mean1)/(var1 + var2)
new_var = 1/(1/var1 + 1/var2)
return [new_mean, new_var]
print update(10.,9.,13., 2.) # [12.454545454545455, 1.6363636363636362]16. Gaussian Motion

17. Predict Fuction
# Write a program that will predict your new mean
# and variance given the mean and variance of your
# prior belief and the mean and variance of your
# motion.
def update(mean1, var1, mean2, var2):
new_mean = (var2 * mean1 + var1 * mean2) / (var1 + var2)
new_var = 1/(1/var1 + 1/var2)
return [new_mean, new_var]
def predict(mean1, var1, mean2, var2):
new_mean = mean1 + mean2
new_var = var1 + var2
return [new_mean, new_var]
print predict(10., 4., 12., 4.) # [22.0, 8.0]18. Kalman Filter Code
# Write a program that will iteratively update and
# predict based on the location measurements
# and inferred motions shown below.
def update(mean1, var1, mean2, var2):
new_mean = float(var2 * mean1 + var1 * mean2) / (var1 + var2)
new_var = 1./(1./var1 + 1./var2)
return [new_mean, new_var]
def predict(mean1, var1, mean2, var2):
new_mean = mean1 + mean2
new_var = var1 + var2
return [new_mean, new_var]
measurements = [5., 6., 7., 9., 10.]
motion = [1., 1., 2., 1., 1.]
measurement_sig = 4.
motion_sig = 2.
mu = 0.
sig = 10000.
#Please print out ONLY the final values of the mean
#and the variance in a list [mu, sig].
for i in range(5):
m = measurements[i]
mm = motion[i]
mu, sig = update(mu, sig, m, measurement_sig)
mu, sig = predict(mu, sig, mm, motion_sig)
# Insert code here
print [mu, sig] # [10.999906177177365, 4.005861580844194]19. Kalman Prediction
20. Kalman Filter Land
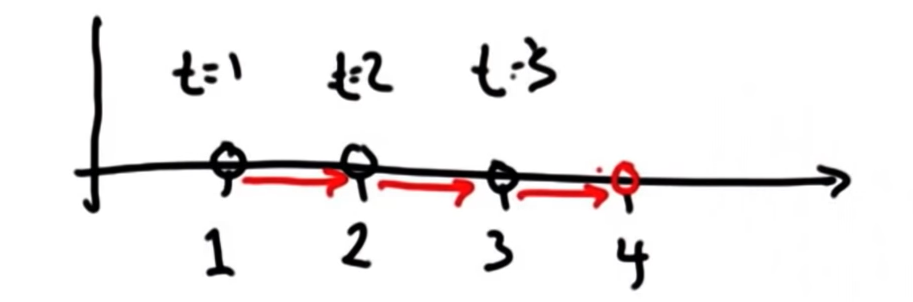
21. Kalman Filter Prediction
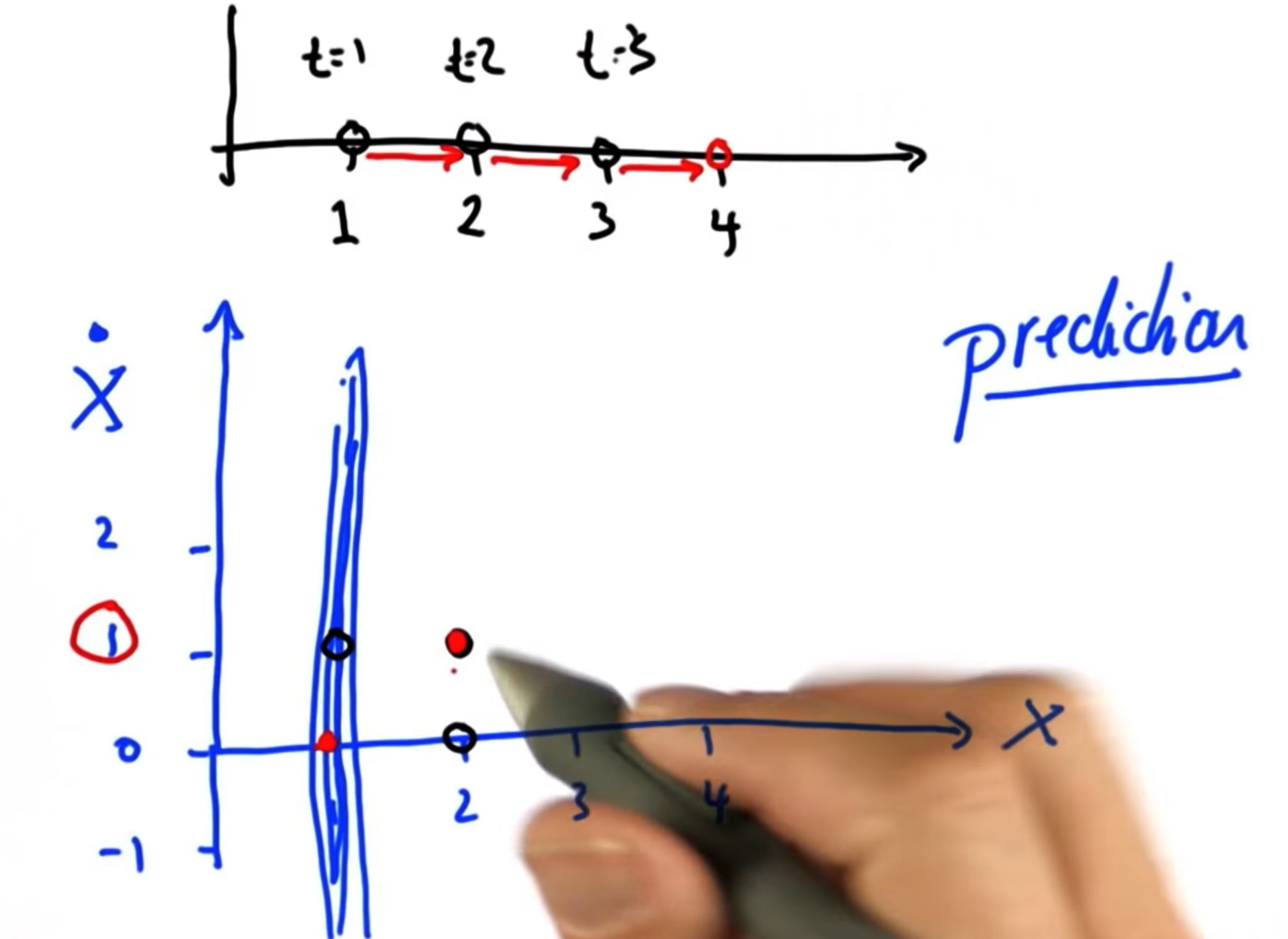
22. Another Prediction
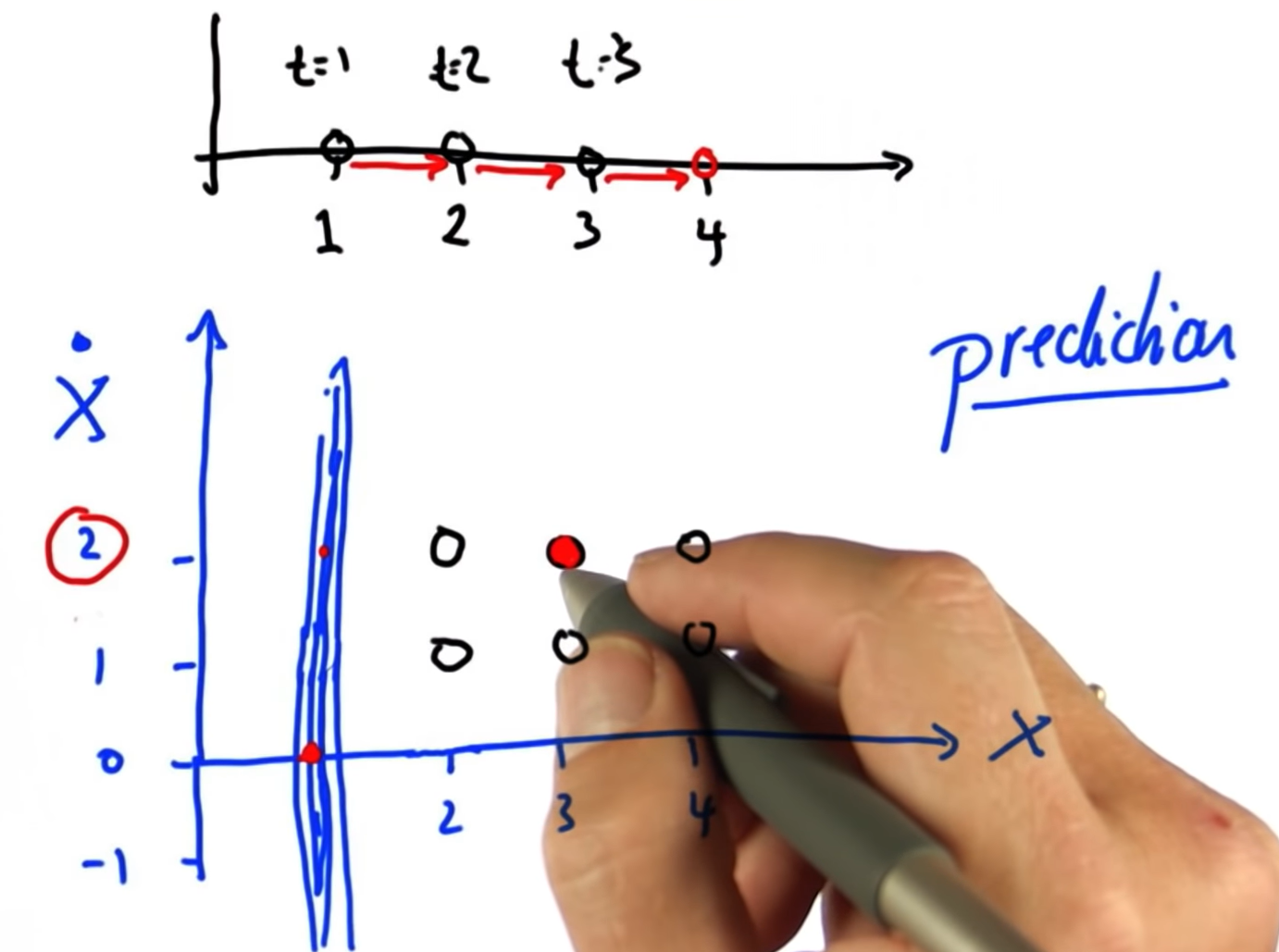
23. More Kalman Filters

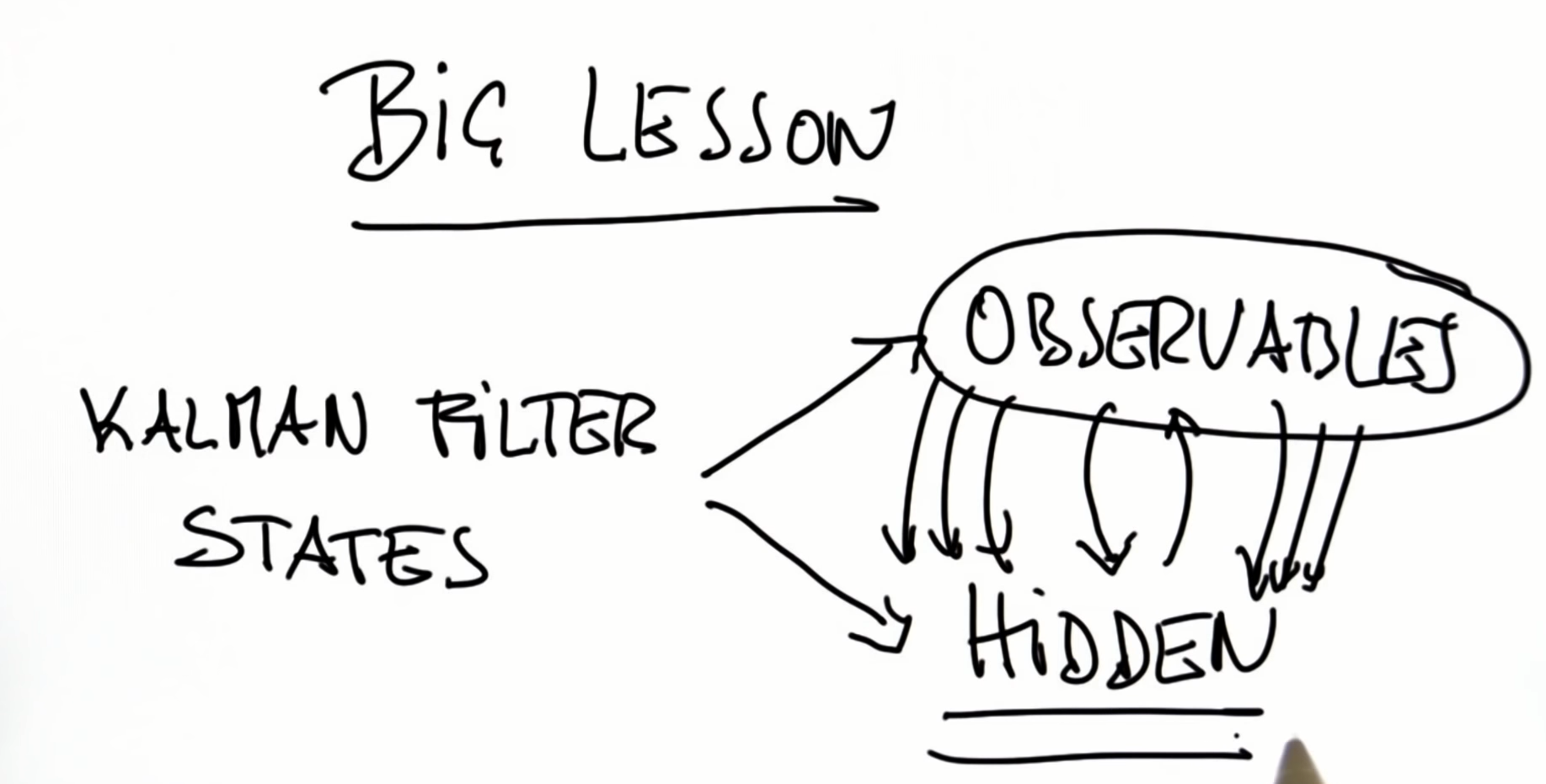
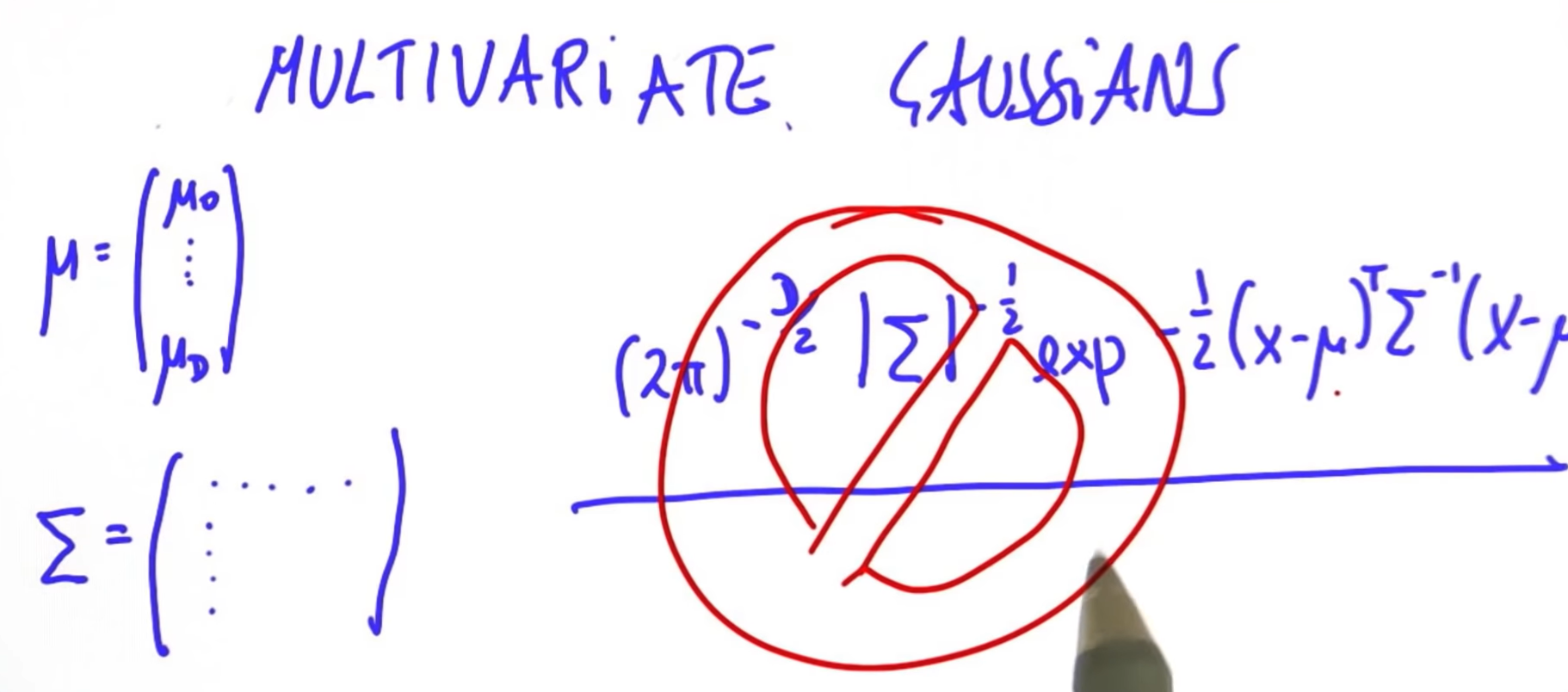
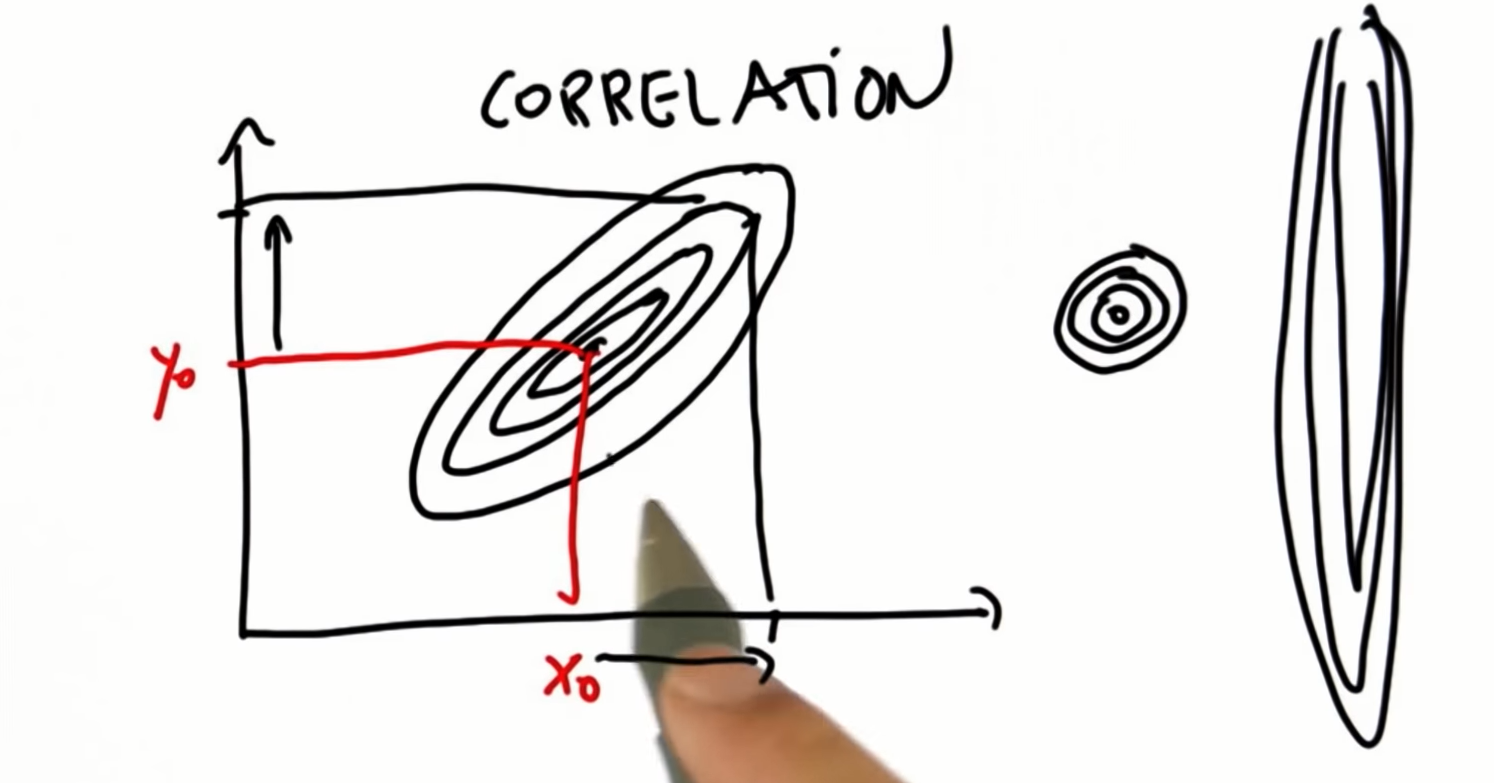
24. Kalman Filter Design

25. Kalman Matrices
# Write a function 'kalman_filter' that implements a multi-
# dimensional Kalman Filter for the example given
from math import *
class matrix:
# implements basic operations of a matrix class
def __init__(self, value):
self.value = value
self.dimx = len(value)
self.dimy = len(value[0])
if value == [[]]:
self.dimx = 0
def zero(self, dimx, dimy):
# check if valid dimensions
if dimx < 1 or dimy < 1:
raise ValueError, "Invalid size of matrix"
else:
self.dimx = dimx
self.dimy = dimy
self.value = [[0 for row in range(dimy)] for col in range(dimx)]
def identity(self, dim):
# check if valid dimension
if dim < 1:
raise ValueError, "Invalid size of matrix"
else:
self.dimx = dim
self.dimy = dim
self.value = [[0 for row in range(dim)] for col in range(dim)]
for i in range(dim):
self.value[i][i] = 1
def show(self):
for i in range(self.dimx):
print(self.value[i])
print(' ')
def __add__(self, other):
# check if correct dimensions
if self.dimx != other.dimx or self.dimy != other.dimy:
raise ValueError, "Matrices must be of equal dimensions to add"
else:
# add if correct dimensions
res = matrix([[]])
res.zero(self.dimx, self.dimy)
for i in range(self.dimx):
for j in range(self.dimy):
res.value[i][j] = self.value[i][j] + other.value[i][j]
return res
def __sub__(self, other):
# check if correct dimensions
if self.dimx != other.dimx or self.dimy != other.dimy:
raise ValueError, "Matrices must be of equal dimensions to subtract"
else:
# subtract if correct dimensions
res = matrix([[]])
res.zero(self.dimx, self.dimy)
for i in range(self.dimx):
for j in range(self.dimy):
res.value[i][j] = self.value[i][j] - other.value[i][j]
return res
def __mul__(self, other):
# check if correct dimensions
if self.dimy != other.dimx:
raise ValueError, "Matrices must be m*n and n*p to multiply"
else:
# multiply if correct dimensions
res = matrix([[]])
res.zero(self.dimx, other.dimy)
for i in range(self.dimx):
for j in range(other.dimy):
for k in range(self.dimy):
res.value[i][j] += self.value[i][k] * other.value[k][j]
return res
def transpose(self):
# compute transpose
res = matrix([[]])
res.zero(self.dimy, self.dimx)
for i in range(self.dimx):
for j in range(self.dimy):
res.value[j][i] = self.value[i][j]
return res
# Thanks to Ernesto P. Adorio for use of Cholesky and CholeskyInverse functions
def Cholesky(self, ztol=1.0e-5):
# Computes the upper triangular Cholesky factorization of
# a positive definite matrix.
res = matrix([[]])
res.zero(self.dimx, self.dimx)
for i in range(self.dimx):
S = sum([(res.value[k][i])**2 for k in range(i)])
d = self.value[i][i] - S
if abs(d) < ztol:
res.value[i][i] = 0.0
else:
if d < 0.0:
raise ValueError, "Matrix not positive-definite"
res.value[i][i] = sqrt(d)
for j in range(i+1, self.dimx):
S = sum([res.value[k][i] * res.value[k][j] for k in range(self.dimx)])
if abs(S) < ztol:
S = 0.0
try:
res.value[i][j] = (self.value[i][j] - S)/res.value[i][i]
except:
raise ValueError, "Zero diagonal"
return res
def CholeskyInverse(self):
# Computes inverse of matrix given its Cholesky upper Triangular
# decomposition of matrix.
res = matrix([[]])
res.zero(self.dimx, self.dimx)
# Backward step for inverse.
for j in reversed(range(self.dimx)):
tjj = self.value[j][j]
S = sum([self.value[j][k]*res.value[j][k] for k in range(j+1, self.dimx)])
res.value[j][j] = 1.0/tjj**2 - S/tjj
for i in reversed(range(j)):
res.value[j][i] = res.value[i][j] = -sum([self.value[i][k]*res.value[k][j] for k in range(i+1, self.dimx)])/self.value[i][i]
return res
def inverse(self):
aux = self.Cholesky()
res = aux.CholeskyInverse()
return res
def __repr__(self):
return repr(self.value)
########################################
# Implement the filter function below
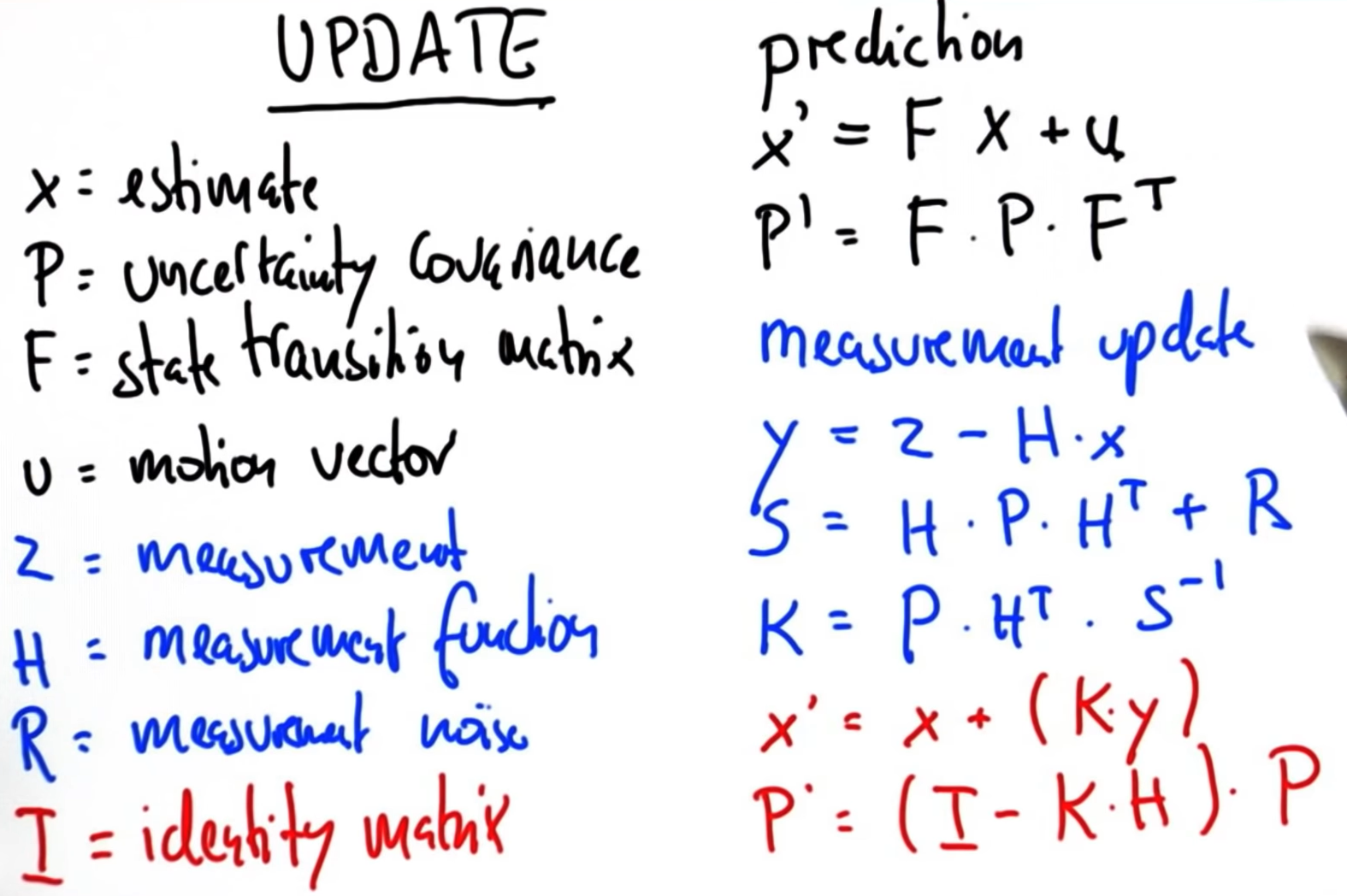
def kalman_filter(x, P):
for n in range(len(measurements)):
z = matrix([[measurements[n]]])
# print(z)
# measurement update
y = z.__sub__(H.__mul__(x))
# print(y)
S = H.__mul__(P).__mul__(H.transpose()).__add__(R)
# print(S)
K = P.__mul__(H.transpose()).__mul__(S.inverse())
# print(K)
x = x.__add__(K.__mul__(y))
# print(x)
P = (I.__sub__(K.__mul__(H))).__mul__(P)
# print(I)
# prediction
x = F.__mul__(x).__add__(u)
# print(x)
P = F.__mul__(P).__mul__(F.transpose())
# print(P)
return x,P
############################################
### use the code below to test your filter!
############################################
measurements = [1, 2, 3]
x = matrix([[0.], [0.]]) # initial state (location and velocity)
P = matrix([[1000., 0.], [0., 1000.]]) # initial uncertainty
u = matrix([[0.], [0.]]) # external motion
F = matrix([[1., 1.], [0, 1.]]) # next state function
H = matrix([[1., 0.]]) # measurement function
R = matrix([[1.]]) # measurement uncertainty
I = matrix([[1., 0.], [0., 1.]]) # identity matrix
print(kalman_filter(x, P))
# output should be:
# x: [[3.9996664447958645], [0.9999998335552873]]
# P: [[2.3318904241194827, 0.9991676099921091], [0.9991676099921067, 0.49950058263974184]]26. Conclusion
반응형